20 KiB
Telemetry
Telemetry allows you to know what is happening on your aircraft while you are flying it. Among other things you can receive battery voltages and GPS positions on your transmitter.
Telemetry can be either always on, or enabled when armed. If a serial port for telemetry is shared with other functionality then then telemetry will only be enabled when armed on that port.
Telemetry is enabled using the 'TELEMETRY' feature.
feature TELEMETRY
Multiple telemetry providers are currently supported, FrSky, Graupner HoTT V4, SmartPort (S.Port), LightTelemetry (LTM). MAVLink, IBUS, Crossfire and GSM SMS.
All telemetry systems use serial ports, configure serial ports to use the telemetry system required. Multiple telemetry streams may be enabled, but only one of each type, e.g. Smartport + LTM or MAVLink + CRSF.
SmartPort (S.Port) telemetry
Smartport is a telemetry system used by newer FrSky transmitters such as the Taranis Q X7, X9D, X9D+, X9E or XJR paired with X-series receivers such as the X4R(SB), X8R, XSR, R-XSR, XSR-M or XSR-E. For older D-series receivers see FrSky telemetry below.
More information about the implementation can be found here: https://github.com/frank26080115/cleanflight/wiki/Using-Smart-Port
Smartport devices are using inverted serial protocol and as such can not be directly connected to all flight controllers. Depending on flight controller CPU family:
| CPU family | Direct connection | Receiver uninverted hack | SoftwareSerial | Additional hardware inverter |
|---|---|---|---|---|
| STM32F4 | not possible (*) | possible | possible | possible |
| STM32F7 | possible | not required | possible | not required |
| STM32H7 | possible | not required | possible | not required |
- possible if flight controller has dedicated, additional, hardware inverter
Smartport uses 57600bps serial speed.
Direct connection for F7/H7
Only TX serial pin has to be connected to Smartport receiver.
set telemetry_inverted = OFF
set telemetry_halfduplex = ON
Receiver uninverted hack
Some receivers (X4R, XSR and so on) can be hacked to get uninverted Smartport signal. In this case connect uninverted signal to TX pad of chosen serial port and enable telemetry_inverted.
set telemetry_inverted = ON
set telemetry_halfduplex = ON
Software Serial
Software emulated serial port allows to connect to Smartport receivers without any hacks. Only TX has to be connected to the receiver.
set telemetry_inverted = OFF
set telemetry_halfduplex = ON
If the solution above is not working, there is an alternative RX and TX lines have to be bridged using 1kOhm resistor (confirmed working with 100Ohm, 1kOhm and 10kOhm)
SmartPort ---> RX (CH5 pad) ---> 1kOhm resistor ---> TX (CH6 pad)
set telemetry_inverted = OFF
SmartPort (S.Port) with external hardware inverter
It is possible to use DIY UART inverter to connect SmartPort receivers to F1 and F4 based flight controllers. This method does not require a hardware hack of S.Port receiver.
SmartPort inverter using bipolar transistors
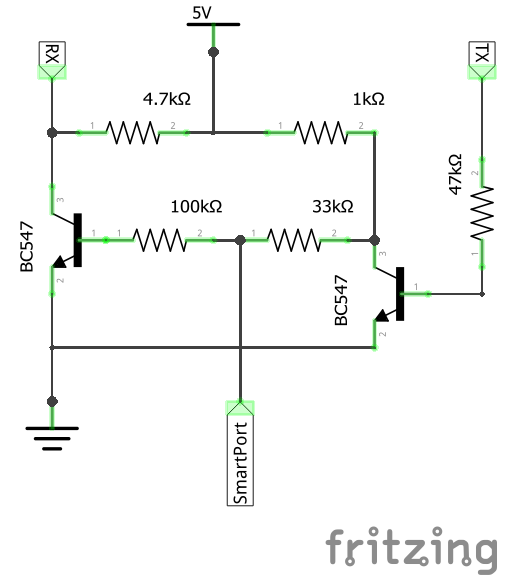
SmartPort inverter using unipolar transistors
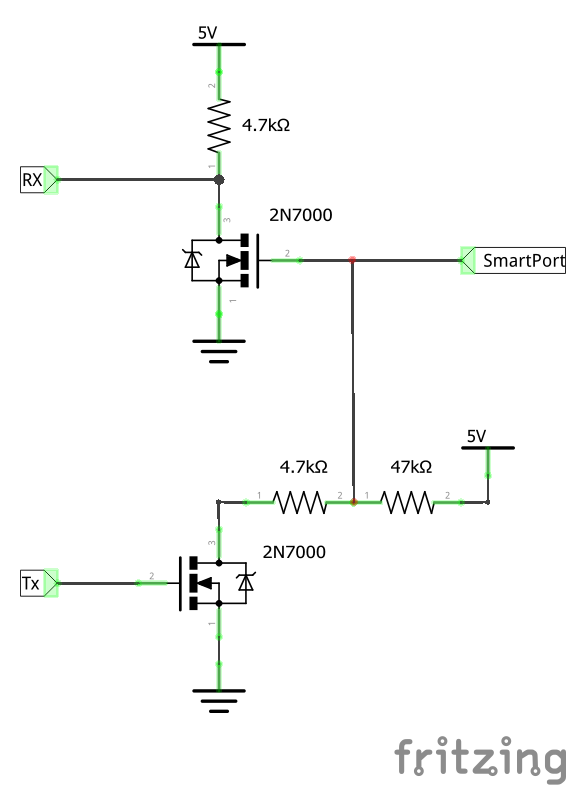
Warning Chosen UART has to be 5V tolerant. If not, use 3.3V power supply instead (not tested)
When the external inverter is used, following configuration has to be applied:
set telemetry_halfduplex = OFF
set telemetry_inverted = ON
Available SmartPort (S.Port) sensors
The following sensors are transmitted
- GSpd : current horizontal ground speed, calculated by GPS.
- VFAS : actual vbat value.
- Curr : actual current comsuption, in amps.
- Alt : barometer based altitude, relative to home location.
- Fuel : if
smartport_fuel_unit = PERCENTremaining battery percentage sent, MAH drawn otherwise. - GPS : GPS coordinates.
- VSpd : vertical speed, unit is cm/s.
- Hdg : heading, North is 0°, South is 180°.
- AccX,Y,Z : accelerometer values (not sent if
frsky_pitch_roll = ON). - Tmp1 : flight mode, sent as 5 digits. Number is sent as ABCDE detailed below. The numbers are additives (for example: if digit C is 6, it means both position hold and altitude hold are active) :
- A : 1 = flaperon mode, 2 = auto tune mode, 4 = failsafe mode
- B : 1 = return to home, 2 = waypoint mode, 4 = headfree mode
- C : 1 = heading hold, 2 = altitude hold, 4 = position hold
- D : 1 = angle mode, 2 = horizon mode, 4 = passthru mode
- E : 1 = ok to arm, 2 = arming is prevented, 4 = armed
- Tmp2 : GPS lock status, accuracy, home reset trigger, and number of satellites. Number is sent as ABCD detailed below. Typical minimum GPS 3D lock value is 3906 (GPS locked and home fixed, HDOP highest accuracy, 6 satellites).
- A : 1 = GPS fix, 2 = GPS home fix, 4 = home reset (numbers are additive)
- B : GPS accuracy based on HDOP (0 = lowest to 9 = highest accuracy)
- C : number of satellites locked (digit C & D are the number of locked satellites)
- D : number of satellites locked (if 14 satellites are locked, C = 1 & D = 4)
- GAlt : GPS altitude, sea level is zero.
- ASpd : true air speed, from pitot sensor.
- A4 : average cell value. Warning : unlike FLVSS and MLVSS sensors, you do not get actual lowest value of a cell, but an average : (total lipo voltage) / (number of cells)
- 0420 : distance to GPS home fix, in meters
- 0430 : if
frsky_pitch_roll = ONset this will be pitch degrees*10 - 0440 : if
frsky_pitch_roll = ONset this will be roll degrees*10 - 0450 : 'Flight Path Vector' or 'Course over ground' in degrees*10
- 0460 : Azimuth in degrees*10
Compatible SmartPort/INAV telemetry flight status
To quickly and easily monitor these SmartPort sensors and flight modes, install OpenTX Telemetry Widget to your Taranis Q X7, X9D, X9D+ or X9E transmitter.
FrSky telemetry
FrSky telemetry is for older FrSky transmitters and D-series receivers. For newer transmitters paired with X-series receivers see SmartPort (S.Port) telemetry above.
FrSky telemetry is transmit only and just requires a single connection from the TX pin of a serial port to the RX pin on an FrSky telemetry receiver.
FrSky telemetry signals are inverted. To connect a INAV capable board to an FrSKy receiver you have some options.
- A hardware inverter - Built in to some flight controllers.
- Use software serial.
- Use a flight controller that has software configurable hardware inversion (e.g. F3 or F7).
For 1, just connect your inverter to a usart or software serial port.
For 2 and 3 use the CLI command as follows:
set telemetry_inverted = OFF
Precision setting for VFAS
INAV can send VFAS (FrSky Ampere Sensor Voltage) in two ways:
set frsky_vfas_precision = 0
This is default setting which supports VFAS resolution of 0.2 volts and is supported on all FrSky hardware.
set frsky_vfas_precision = 1
This is new setting which supports VFAS resolution of 0.1 volts and is supported by OpenTX and er9x/ersky9x firmware (this method uses custom ID 0x39).
Notes
Many of the same SmartPort telemetry values listed above are also sent with FrSky D-Series telemetry.
RPM shows throttle output when armed. RPM shows when disarmed. RPM requires that the 'blades' setting is set to 12 on your receiver/display - tested with Taranis/OpenTX.
HoTT telemetry
Only Electric Air Modules and GPS Modules are emulated.
Use the latest Graupner firmware for your transmitter and receiver.
Older HoTT transmitters required the EAM and GPS modules to be enabled in the telemetry menu of the transmitter. (e.g. on MX-20)
You can use a single connection, connect HoTT RX/TX only to serial TX, leave serial RX open and make sure the setting telemetry_halfduplex is OFF.
The following information is deprecated, use only for compatibility:
Serial ports use two wires but HoTT uses a single wire so some electronics are required so that the signals don't get mixed up. The TX and RX pins of
a serial port should be connected using a diode and a single wire to the T port on a HoTT receiver.
Connect as follows:
- HoTT TX/RX
T-> Serial RX (connect directly) - HoTT TX/RX
T-> Diode-( |)-> Serial TX (connect via diode)
The diode should be arranged to allow the data signals to flow the right way
-( |)- == Diode, | indicates cathode marker.
1N4148 diodes have been tested and work with the GR-24.
When using the diode enable telemetry_halfduplex, go to CLI and type set telemetry_halfduplex = ON, don't forget a save afterwards.
As noticed by Skrebber the GR-12 (and probably GR-16/24, too) are based on a PIC 24FJ64GA-002, which has 5V tolerant digital pins.
Note: The SoftSerial ports may not be 5V tolerant on your board. Verify if you require a 5v/3.3v level shifters.
LightTelemetry (LTM)
LTM is a lightweight streaming telemetry protocol supported by a number of OSDs, ground stations and antenna trackers.
The INAV implementation of LTM implements the following frames:
- G-FRAME: GPS information (lat, long, ground speed, altitude, sat info)
- A-FRAME: Attitude (pitch, roll, heading)
- S-FRAME: Status (voltage, current+, RSSI, airspeed+, status). Item suffixed '+' not implemented in INAV.
- O-FRAME: Origin (home position, lat, long, altitude, fix)
In addition, in iNav:
- N-FRAME: Navigation information (GPS mode, Nav mode, Nav action, Waypoint number, Nav Error, Nav Flags).
- X-FRAME: Extra information. Currently HDOP is reported.
LTM is transmit only, and can work at any supported baud rate. It is designed to operate over 2400 baud (9600 in INAV) and does not benefit from higher rates. It is thus usable on soft serial.
A CLI variable ltm_update_rate may be used to configure the update rate and hence band-width used by LTM, with the following enumerations:
- NORMAL: Legacy rate, currently 303 bytes/second (requires 4800 bps)
- MEDIUM: 164 bytes/second (requires 2400 bps)
- SLOW: 105 bytes/second (requires 1200 bps)
For many telemetry devices, there is direction correlation between the air-speed of the radio link and range; thus a lower value may facilitate longer range links.
More information about the fields, encoding and enumerations may be found on the wiki.
MAVLink telemetry
MAVLink is a lightweight header-only message marshalling library for micro air vehicles. INAV supports MAVLink for compatibility with ground stations, OSDs and antenna trackers built for PX4, PIXHAWK, APM and Parrot AR.Drone platforms.
MAVLink implementation in INAV is transmit-only and usable on low baud rates and can be used over soft serial (requires 19200 baud). MAVLink V1 and V2 are supported.
Cellular telemetry via text messages
INAV can use a SimCom SIM800 series cellular module to provide telemetry via text messages. Telemetry messages can be requested by calling the module's number or sending it a text message. The module can be set to transmit messages at regular intervals, or when an acceleration event is detected. A text message command can be used to put the flight controller into RTH mode.
The telemetry message looks like this:
12.34V 2.0A ALT:5 SPD:10/13.6 DIS:78/19833 HDG:16 SAT:21 SIG:9 ANG maps.google.com/?q=6FG22222%2B222
giving battery voltage, current, altitude (m), speed / average speed (m/s), distance to home / total traveled distance (m), heading (degrees), number of satellites, cellular signal strength, flight mode and GPS coordinates as a Google Maps link. SIG has a range of 0 -- 31, with a value of 10 or higher indicating a usable signal quality.
Transmission at regular intervals can be set by giving a string of flags in the CLI variable sim_transmit_flags: T - transmit continuously, F - transmit in failsafe mode, A - transmit when altitude is lower than sim_low_altitude, G - transmit when GPS signal quality is low. A only transmits in ALT HOLD, WAYPOINT, RTH, and FAILSAFE flight modes. The transmission interval is given by sim_transmit_interval and is 60 seconds by default.
Text messages sent to the module can be used to set the transmission flags during flight, or to issue a RTH command to the flight controller. If a message begins with RTH it toggles forced RTH on / off, otherwise it is taken as a value for sim_transmit_flags. Note that an empty message turns transmission off, setting all flags to zero.
Acceleration events are indicated at the beginning of the message as follows: HIT! indicates impact / high g event, HIT indicates landing / backwards acceleration event, DROP indicates freefall / low g event.
To receive acceleration event messages, set one or more of the acceleration event threshold CLI variables to a nonzero value, and use the A flag in sim_transmit_flags. acc_event_threshold_high is the threshold (in cm/s/s) for impact detection by high magnitude of acceleration. acc_event_threshold_low is the threshold for freefall detection by low magnitude of acceleration. acc_event_threshold_neg_x is the threshold for landing detection (for fixed wing models) by high magnitude of negative x axis acceleration.
Ibus telemetry
Ibus telemetry requires a single connection from the TX pin of a bidirectional serial port to the Ibus sens pin on an FlySky telemetry receiver. (tested with fs-iA6B receiver, iA10 should work)
It shares 1 line for both TX and RX, the rx pin cannot be used for other serial port stuff. It runs at a fixed baud rate of 115200, so it need hardware uart (softserial is limit to 19200).
_______
/ \ /-------------\
| STM32 |-->UART TX-->[Bi-directional @ 115200 baud]-->| Flysky RX |
| uC |- UART RX--x[not connected] | IBUS-Sensor |
\_______/ \-------------/
It is possible to daisy chain multiple sensors with ibus, but telemetry sensor will be overwrite by value sensor. In this case sensor should be connected to RX and FC to sensor.
_______
/ \ /---------\ /-------------\ /-------------\
| STM32 |-->UART TX-->[Bi-directional @ 115200 baud]-->| CVT-01 |-->|others sensor|-->| Flysky RX |
| uC |- UART RX--x[not connected] \---------/ \-------------/ | IBUS-Sensor |
\_______/ \-------------/
Configuration
Ibus telemetry is default enabled in the all firmware. IBUS telemetry is disabled on ALIENWIIF3, RMDO at build time using defines in target.h.
#undef TELEMETRY_IBUS
Available sensors
The following sensors are transmitted :
Sensors number:
1.Internal voltage in volts (not usable).
2.Valtage sensor in volts (Voltage type).
3.If baro sensor is avaliable then return temperature from baro sensor in °C else return temperature from gyro sensor in °C (Temperatyre type).
4.Status (Rpm type).
5.Course in degree (Rpm type).
6.Current in ampers (Voltage type).
7.Altitude in meters (Voltage type).
8.Direction to home in degree (Rpm type).
9.Distance to home in meters(Rpm type).
10.GPS course in degree (Rpm type).
11.GPS altitude in meters (Rpm type).
12.Second part of Lattitude (Rpm type), for example 5678 (-12.3456789 N).
13.Second part of Longitude (Rpm type), for example 6789 (-123.4567891 E).
14.First part of Lattitude (Voltage type), for example -12.45 (-12.3456789 N).
15.First part of Longitude (Voltage type), for example -123.45 (-123.4567890 E).
16.GPS speed in km/h (Rpm type).
1.Transmitter voltage in volts (not usable).
1.Error percent in % (not usable).
Sensors from 8 to 16 are avaliable only if GPS is at built time.
STATUS (number of satelites AS #0, FIX AS 0, HDOP AS 0, Mode AS 0)
FIX: 1 is No, 2 is 2D, 3 is 3D, 6 is No+FixHome, 7 is 2D+FixHome, 8 is 3D+FixHome
HDOP: 0 is 0-9m, 8 is 80-90m, 9 is >90m
Mode: 0 - Passthrough, 1-Armed(rate), 2-Horizon, 3-Angle, 4-Waypoint, 5-AltHold, 6-PosHold, 7-Rth, 8-Launch, 9-Failsafe
Example: 12803 is 12 satelites, Fix3D, FixHome, 0-9m HDOP, Angle Mode
CLI command
ibus_telemetry_type
0.Standard sensor type are used (Temp,Rpm,ExtV). Each transmitter should support this. (FS-i6, FS-i6S).
1.This same as 0, but GPS ground speed (sensor 16) is of type Speed in km/h. (FS-i6 10ch_MOD_i6_Programmer_V1_5.exe from https://github.com/benb0jangles/FlySky-i6-Mod-).
2.This same as 1, but GPS altitude (sensor 11) is of type ALT in m. (FS-i6 10ch_Timer_MOD_i6_Programmer_V1_4.exe from https://github.com/benb0jangles/FlySky-i6-Mod-).
3.This same as 2, but each sensor have its own sensor id. (FS-i6 10ch_Mavlink_MOD_i6_Programmer_V1_.exe from https://github.com/benb0jangles/FlySky-i6-Mod-): sensor 4 is of type S85, sensor 5 is of type ACC_Z, sensor 6 is of type CURRENT, sensor 7 is of type ALT, sensor 8 is of type HEADING, sensor 9 is of type DIST, sensor 10 is of type COG, sensor 10 is of type GALT, sensor 12 is of type GPS_LON, sensor 13 is of type GPS_LAT, sensor 14 is of type ACC_X, sensor 15 is of type ACC_Y, sensor 16 is of type SPEED.
4.This same as 3, but support 4 byte sensors. (fix_updater_03_16_21_33_1 from https://github.com/qba667/FlySkyI6/tree/master/release): sensor 7 is 4byte ALT, 12 is PRESURE or PITOT_SPEED if avaliable, 13 is GPS_STATUS, 14 is 4byte GPS_LON, 15 is 4byte GPS_LAT. This required a receiver with new firmware that support SNR, RSSI and long frames (For FS-IA6B since August 2016 or need upgrade to wersion 1.6 https://github.com/povlhp/FlySkyRxFirmware).
5.This same as 4, but sensor 3 is ARMED, 4 is MODE, 12 is CLIMB.
6.For hali9_updater_04_21_23_13.bin from https://www.rcgroups.com/forums/showthread.php?2486545-FlySky-FS-i6-8-channels-firmware-patch%21/page118 or https://github.com/benb0jangles/FlySky-i6-Mod-/tree/master/10ch%20qba667_hali9%20Updater sensor 4 is of type CURRENT, sensor 5 is of type HEADING, sensor 6 is of type COG, sensor 7 is of type CLIMB, sensor 8 is of type YAW, sensor 9 is of type DIST, sensor 10 is of type PRESURE or PITOT_SPEED if avaliable, sensor 11 is of type SPEED, sensor 12 is of type GPS_LAT, sensor 13 is of type GPS_LON, sensor 14 is of type GALT, sensor 15 is of type ALT, sensor 16 is of type S85.
7.This same as 6, but sensor 3 is GPS_STATUS, 10 is ARMED, 16 is MODE.
8.This same as 7, but sensor 10 (ARMED) is reversed.
131.This same as 3, but sensor 16 (type SPEED) is in m/s.
132.This same as 4, but sensor 16 (type SPEED) is in m/s.
133.This same as 5, but sensor 16 (type SPEED) is in m/s.
134.This same as 6, but sensor 11 (type SPEED) is in m/s.
135.This same as 7, but sensor 11 (type SPEED) is in m/s.
136.This same as 8, but sensor 11 (type SPEED) is in m/s.
RX hardware
These receivers are reported to work with i-bus telemetry:
- FlySky/Turnigy FS-iA6B 6-Channel Receiver (http://www.flysky-cn.com/products_detail/&productId=51.html)
- FlySky/Turnigy FS-iA10B 10-Channel Receiver (http://www.flysky-cn.com/products_detail/productId=52.html)
Note that the FlySky/Turnigy FS-iA4B 4-Channel Receiver (http://www.flysky-cn.com/products_detail/productId=46.html) seems to work but has a bug that might lose the binding, DO NOT FLY the FS-iA4B!
Use ibus RX and ibus telemetry on only one port.
Case:
A. For use only IBUS RX connect directly Flysky IBUS-SERVO to FC-UART-RX. In configurator set RX on selected port, set receiver mode to RX_SERIAL and Receiver provider to IBUS.
B. For use only IBUS telemetry connect directly Flysky IBUS-SENS to FC-UART-TX. In configurator set IBUS telemetry on selected port and enable telemetry feature.
C. For use RX IBUS and telemetry IBUS together connect Flysky IBUS-SERVO and IBUS-SENS to FC-UART-TX using schematic:
+---------+
| FS-iA6B |
| |
| Servo |---|<---\ +------------+
| | | | FC |
| Sensor |---[R]--*-------| Serial TX |
+---------+ +------------+
R = 10Kohm, Diode 1N4148 (connect cathode to IBUS-Servo of Flysky receiver).
In configurator set IBUS telemetry and RX on this same port, enable telemetry feature, set receiver mode to RX_SERIAL and Receiver provider to IBUS.
Warning: Schematic above work also for connect telemetry only, but not work for connect rx only - will stop FC.